
Logarithm TheoremPythagorean TheoremCombinatoricsQuadratic EquationsSequence and Series
`-=[]⟨⟩\;',./~!@#$%^&*()_+{}|:"<>? 𝑎𝑏𝑐𝑑𝑒𝑓𝑔ℎ𝑖𝑗𝑘𝑙𝑚𝑛𝑜𝑝𝑞𝑟𝑠𝑡𝑢𝑣𝑤𝑥𝑦𝑧
Å − × ⋅∓±∘꞊﹦∗∙ ℯ 𝔸𝔹ℂ𝔻𝔼𝔽𝔾ℍ𝕀𝕁𝕂𝕃𝕄ℕ𝕆ℙℚℝ𝕊𝕋𝕌𝕍𝕎𝕏𝕐ℤ𝐴𝐵𝐶𝐷𝐸𝐹𝐺𝐻𝐼𝐽𝐾𝐿𝑀𝑁𝑂𝑃𝑄𝑅𝑆𝑇𝑈𝑉𝑊𝑋𝑌𝑍
∼∽∾≁≂≃≄≅≆≇≈≉≌≐≠≡ ≤≥≦≧≨≩≪≫
∈∉∊∋∌∍ ⊂⊃⊄⊅⊆⊇ 𝛼𝛽𝛾𝛿𝜀𝜁𝜂𝜃𝜄𝜅𝜆𝜇𝜈𝜉𝜊𝜋𝜌𝜎𝜏𝜐𝜑𝜒𝜓𝜔
∀∂∃∅⦰∆∇∎∞∝∴∵ ∏∐∑⋀⋁⋂⋃ ∧∨∩∪
∫∬∭∮∯∰∱∲∳ ∥⋮⋯⋰⋱ ‖ ′ ″ ‴ ⁄ ⁗ ʹ ʺ ‵ ‶ ‷
﹁ ﹂ ﹃ ﹄ ︹ ︺ ︻ ︼ ︗ ︘ ︿ ﹀ ︽ ︾ ﹇ ﹈ ︷ ︸ ⏜ ⏝ ⎴ ⎵ ⏞ ⏟ ⏠ ⏡
←↑→↓↤↦↥↧↔↕↖↗↘↙▲▼◀▶↺↻⟲⟳ ↼↽↾↿⇀⇁⇂⇃⇄⇅⇆⇇ ⇐⇑⇒⇓⇔⇌⇍⇏⇕⇖⇗⇘⇙⇙⇳⥢⥣⥤⥥⥦⥧⥨⥩⥪⥫⥬⥭⥮⥯
Draft for Information Only
ContentOperations of Vectors
Operations of VectorsThe operations of vectors can be divided into algebraic operations and vector product operations.Algebraic Operations of VectorsLike other mathematical calculations, rules are developed for the algebraic operations for vectorsScalar Multiplication of a Vector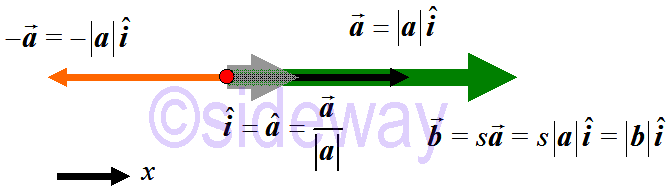 Consider a one-dimensional vector
Consider a one-dimensional vector 𝒂, a unit vector 𝒊can always be obtained such that vector 𝒂can be expressed in terms of the unit vector by multiplying a scalar quantity, the magnetude of the vector, that is 𝒂=| 𝒂| 𝒊. Therefore the scalar multiplication of a one-dimensional vector can be expressed as the multiplication of a scalar 𝑠 to the magnetude | 𝒂| of a vector 𝒂with respect to the unit vector 𝒂or 𝒊of the vector. That is 𝑠 𝒂=𝑠| 𝒂| 𝒊. And the negation of a vector always reverse the vector in opposite direction. 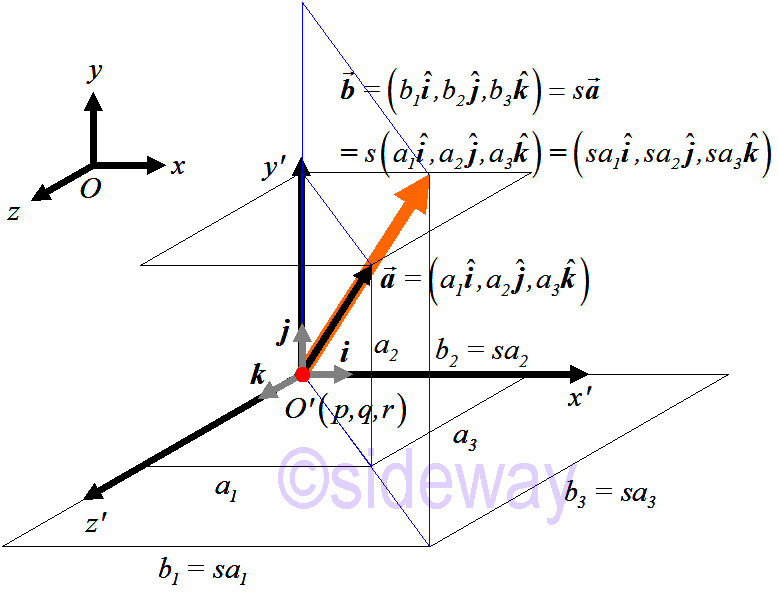
For a vector in space, the vector can be decomposited into components with respect to the rectangular Cartesian coordinate system. Each component of the vetor can be considered as one individual dimension. By the triangular approach, the scalar multiplication of a vector in space can also be expressed as the multiplication of a scalar to the magnetude of each component with respect to the unit vector accordingly. That is 𝑠 Scalar Multiplication RuleScalar Multiplication of a VectorLet
Addition of Two Vectors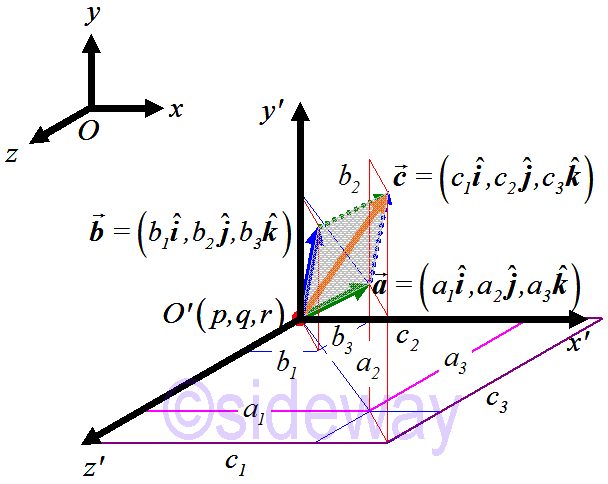 Geometrically, addition of two coinitial vectors, i.e.
Geometrically, addition of two coinitial vectors, i.e. 𝒂+ 𝒃, can be visualized by using the parallelogram law through putting the initial point of second vector 𝒃at the terminal point of first vector 𝒂because two coinitial vectors are always coplanar vectors. The resultant vector 𝒄can be obtained by joining the initial point of first vector to the terminal point of second vector. That is 𝒄= 𝒂+ 𝒃=(𝑎1,𝑎2,𝑎3)+(𝑏1,𝑏2,𝑏3)=(𝑎1+𝑏1,𝑎2+𝑏2,𝑎3+𝑏3)=(𝑐1,𝑐2,𝑐3) 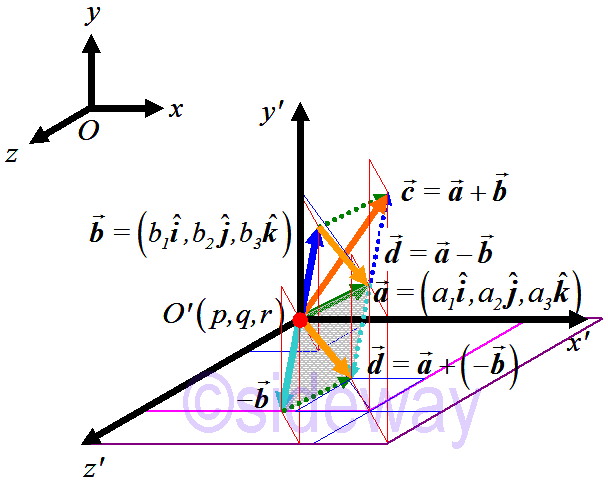 Similarly, subtraction of two coinitial vectors, i.e.
Similarly, subtraction of two coinitial vectors, i.e. 𝒂− 𝒃, can also be visualized by using the parallelogram law through putting the initial point of the negation of second vector 𝒃, i.e. − 𝒃, at the terminal point of first vector 𝒂. The resultant vector 𝒅can be obtained by joining the initial point of first vector to the terminal point of negation of second vector as in addition of vectors. That is 𝒅= 𝒂+(− 𝒃) Besides, the subtraction of two coinitial vectors can be constructed directly from vectors 𝒂and 𝒃by the basic definition of vector, that is 𝒅= 𝒂− 𝒃= 𝐵𝐴=− 𝐴𝐵=−( 𝒃− 𝒂). Addition RuleAddition of VectorsLet
Vector Product Operation of VectorsVector product operation of vectors are rules developed for specific product operation between two vectors. In general, the product of two vectors can be expressed as following.Let
Dot Product of Two VectorsDot product is commonly called scalar product because dot product of two vectors gives a scalar value along either vector. Dot product is also called inner product because dot product of two vectors is the sum of products of corresponding components of two vectors. The dot product operation of two vectors is developed to determine the along effect of one vector's component that along with another vector.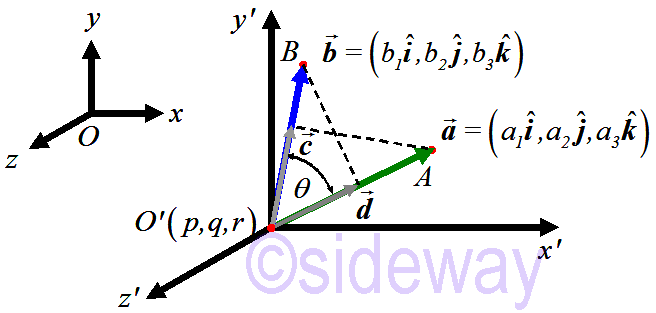 Therefore the dot product of two coinitial vectors,
Therefore the dot product of two coinitial vectors, 𝒂and 𝒃can be interpreted as the magnitude of one vector multiplies by the perpendicular projection of another vector on the previous one taken with the appropriate sign. In other words, the dot product between two vectors gives a scalar result with no direction. According to the definition of dot product, the dot product of any unit vector dotted with itself is equal to 1, and the dot product magnetude of any two different unit vectors is equal to 0. 𝒊∙𝒊=𝒋∙𝒋=𝒌∙𝒌=
The dot product can be visualized geometrically in two-dimensional space.
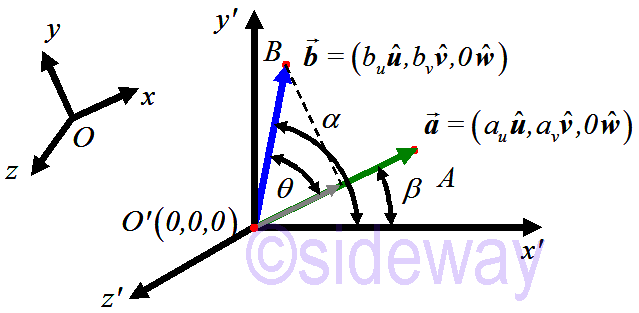 Select another rectangular Cartesian coordinate system such that vectors
Select another rectangular Cartesian coordinate system such that vectors 𝒂and 𝒃lie on the 𝑥𝑦-plane. The angles difference identity for cosine can then be used to derived the dot product of two vectors. And can further be extended to three-dimentional space. Let
Value of dot product can be verified trigonometrically by applying the law of cosine to the triangle ⧍𝑂𝐴𝐵 with 𝜃 is the angle between vectors 𝒂and 𝒃. Let
Therefore angle between two coinitial vectors can be determined by dot product
|
Dot Product RuleDot Product RuleLet
Cross Product of Two VectorsUnlike determining the effect of one vector's component that along with another vector by the dot product opereation of two vector, the cross product operation of two vectors is developed to determine the cross effect of one vector's component that perpendicular to another vector. Therefore the axis of cross effect due to the cross product always normal to the plane of the two vectors lying in.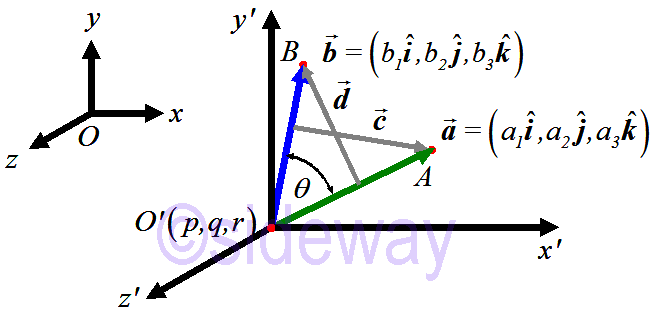 According to the definition of cross product, the cross product of any unit vector crossed with itself is equal to 𝟎. The cross product of any two different unit vectors that follows the right hand rule is equal to 𝟏normal, while the cross product of any two different unit vectors that does not follows the right hand rule is equal to −𝟏normal.
According to the definition of cross product, the cross product of any unit vector crossed with itself is equal to 𝟎. The cross product of any two different unit vectors that follows the right hand rule is equal to 𝟏normal, while the cross product of any two different unit vectors that does not follows the right hand rule is equal to −𝟏normal.
𝒊×𝒊=𝒋×𝒋=𝒌×𝒌=
Magnetude of cross product can be considered geometrically as the area of a parallelogram with 𝜃 is the angle between vectors 𝒂and 𝒃. 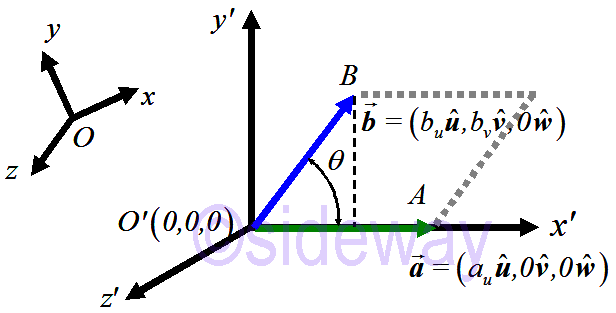 Select another rectangular Cartesian coordinate system such that vectors
Select another rectangular Cartesian coordinate system such that vectors 𝒂and 𝒃lie on the 𝑥𝑦-plane and vector 𝒂lies on the 𝑥-axis. Let
Therefore angle between two coinitial vectors can be determined by cross product.
|
Cross Product RuleCross Product RuleLet
©sideway ID: 130800175 Last Updated: 12/11/2019 Revision: 1 Ref: References
Latest Updated Links
  Nu Html Checker Nu Html Checker  na na |
 Home 5 Business Management HBR 3 Information Recreation Hobbies 9 Culture Chinese 1097 English 339 Travel 53 Reference 79 Hardware 55 Computer Hardware 261 Software Application 213 Digitization 37 Latex 52 Manim 205 KB 1 Numeric 19 Programming Web 290 Unicode 504 HTML 66 CSS 65 Selector 1 SVG 46 ASP.NET 270 OS 447 MS Windows DeskTop 7 Python 72 Knowledge Mathematics Formulas 8 Set 1 Logic 1 Algebra 84 Number Theory 207 Trigonometry 31 Geometry 34 Calculus 67 Engineering Tables 8 Mechanical Rigid Bodies Statics 92 Dynamics 37 Fluid 5 Control Acoustics 19 Natural Sciences Matter 1 Electric 27 Biology 1 |
Copyright © 2000-2026 Sideway . All rights reserved Disclaimers last modified on 06 September 2019